产品介绍 轻地图和高精定位解决方案
LRVD数据(Lightweight Road Vector Data)
LRVD 是为了满足L2+及更高级别辅助驾驶功能对地图的需求而创新定义并开发的矢量地图数据,它采用视觉众包方式制成,
具备丰富的道路元素及车道级信息,相比传统高精地图极大的降低了建图成本并提高了更新频率,为城市辅助驾驶以及行泊一体智能驾驶规模化落地提供了基础。
LRVD应用
高速领航辅助驾驶; 高级泊车辅助驾驶; 行泊一体辅助驾驶;
LRVD优势
轻量化数据:小于 30 KB/km; 精度高:分米级; 交付快,更新快:数据生成过程高度自动化; 高度定制化:由客户指定道路区域,道路元素类型等; 可配套提供LRVD引擎和融合定位软件;
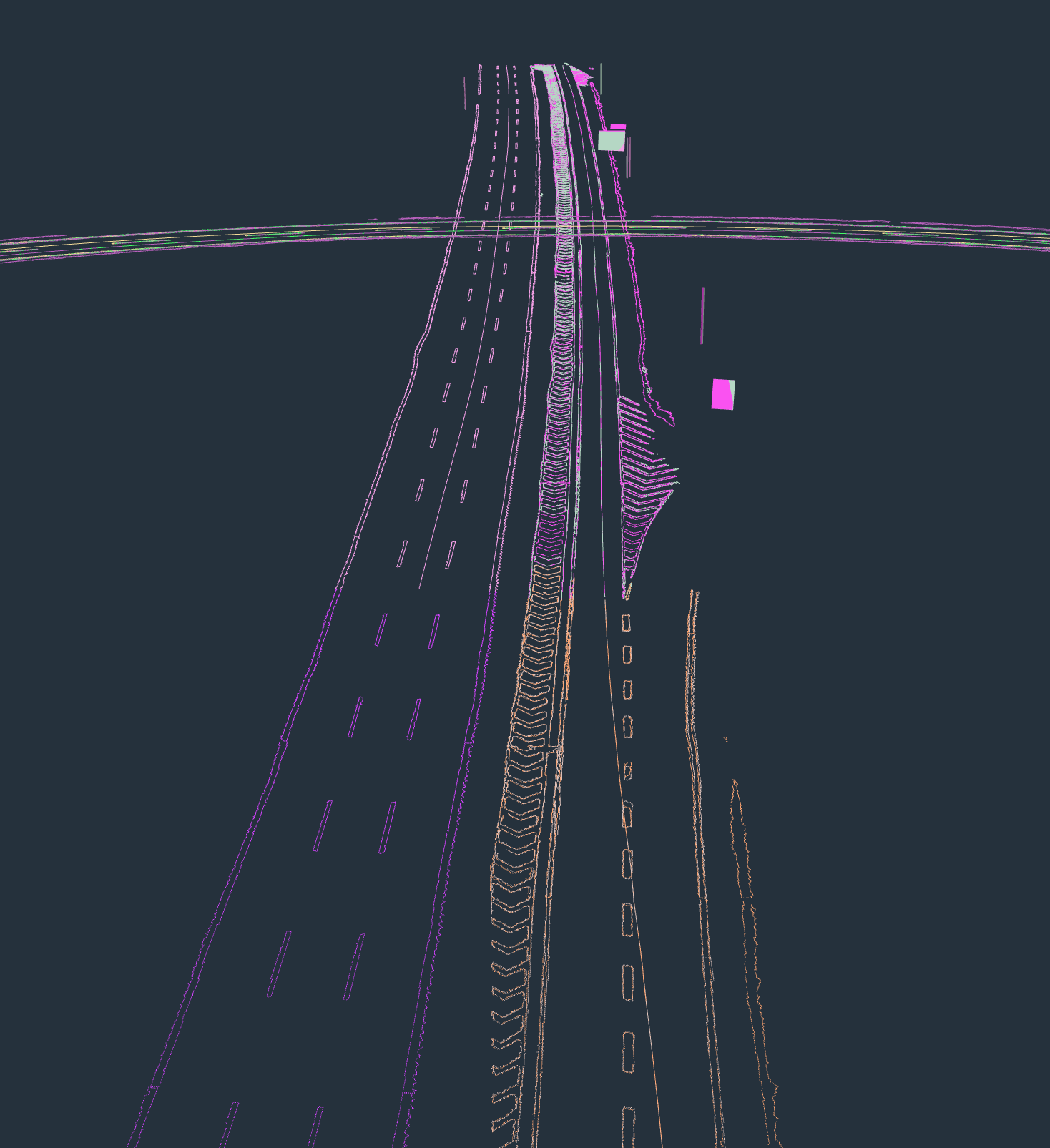
高速道路多车众包数据
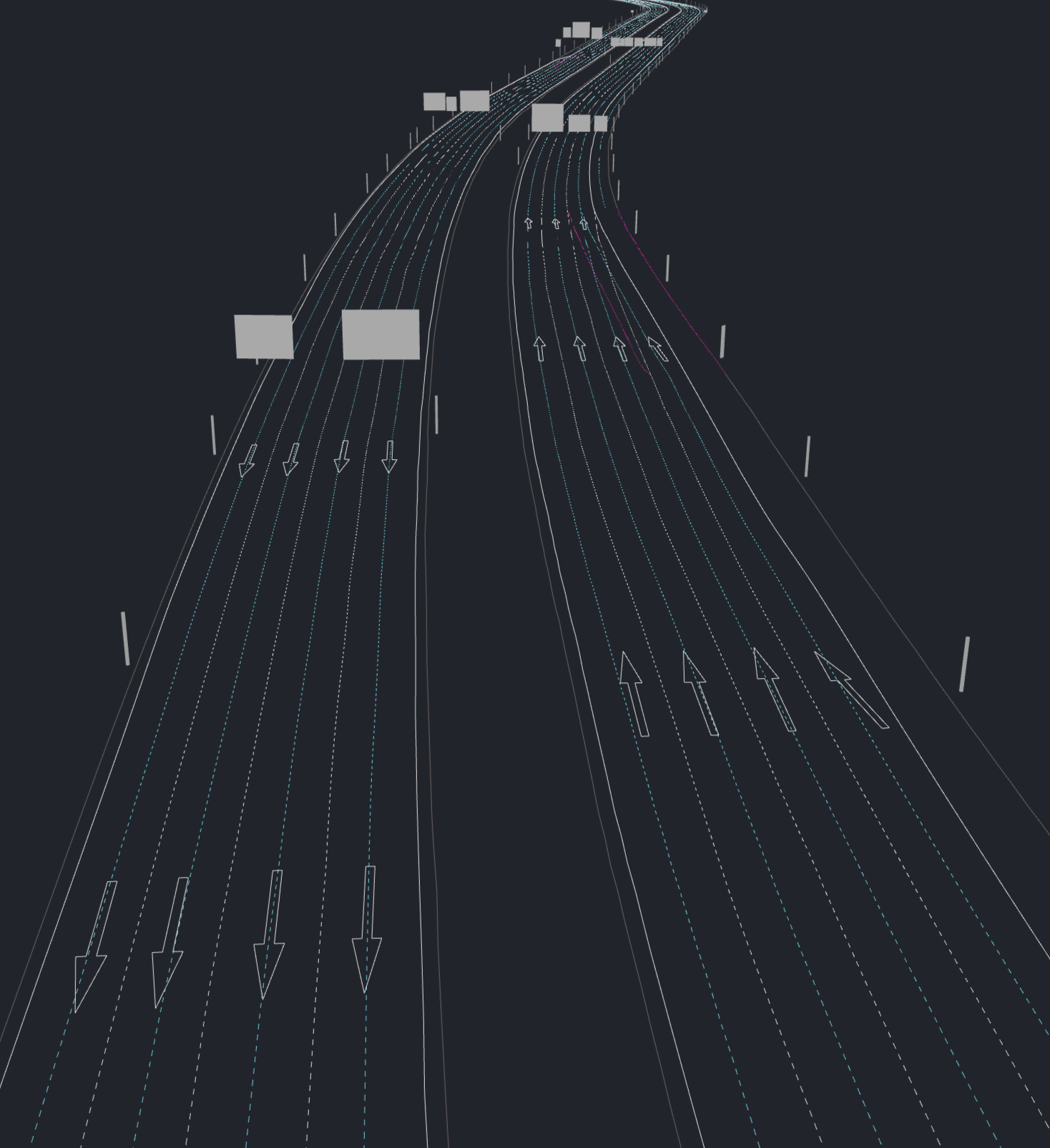
LRVD数据
CLMS方案(Crowdsourcing Lightweight Map Solution)
CLMS方案包含完整的平台化制图产线及相关的工具链,为客户企业输出低成本的采图制图解决方案。 我们还可以通过端到端的深度定制,接入个性化的地图需求和技术,打造属于客户自己的智能驾驶技术生态。
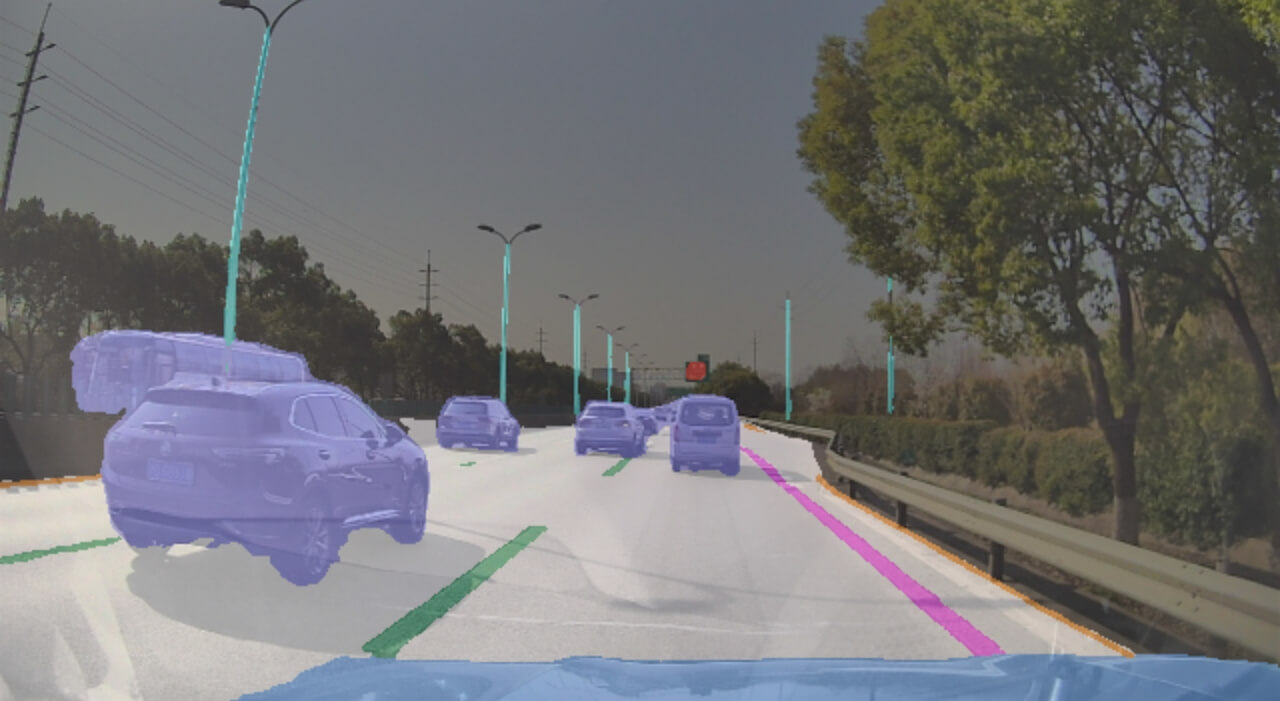 环境感知
环境感知 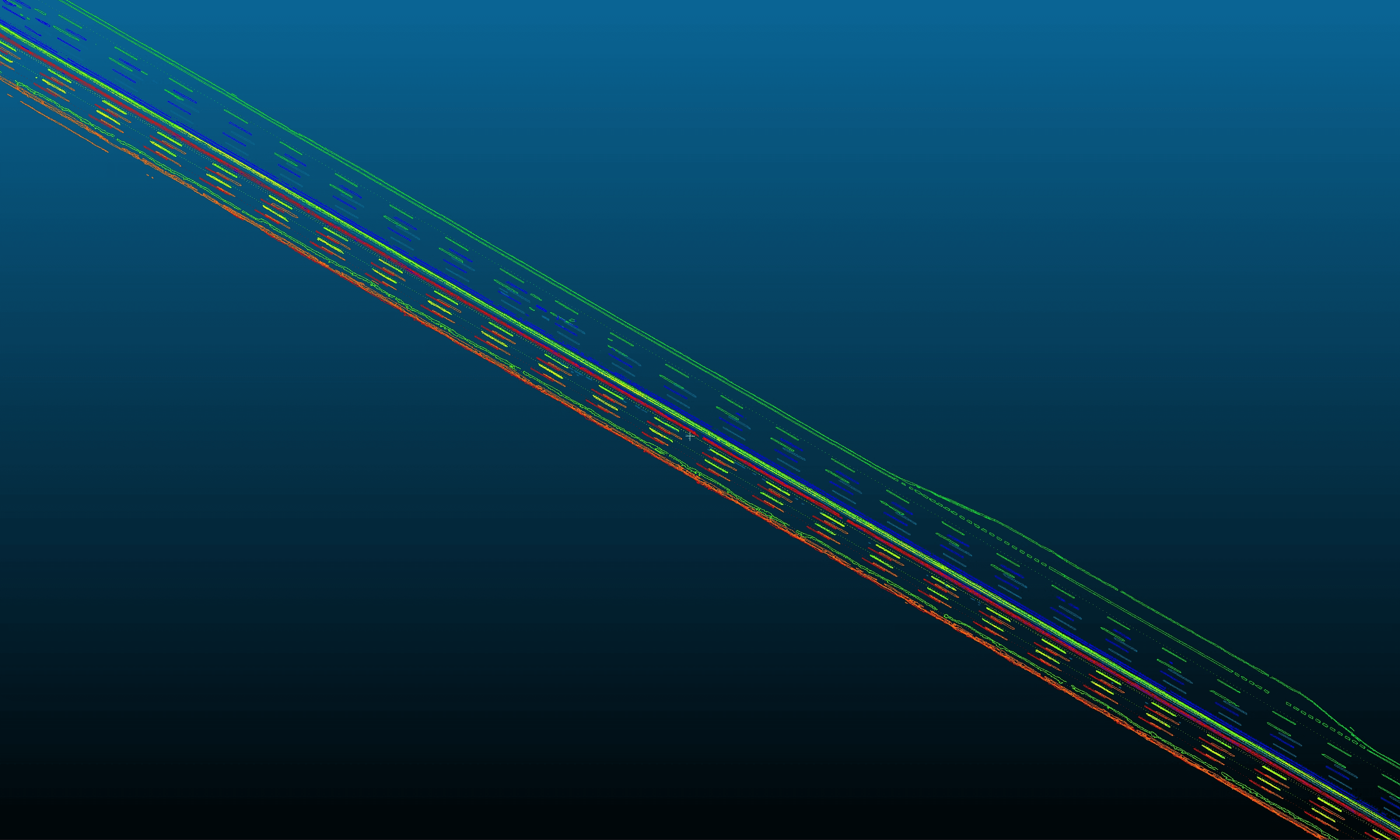 车端上报
车端上报 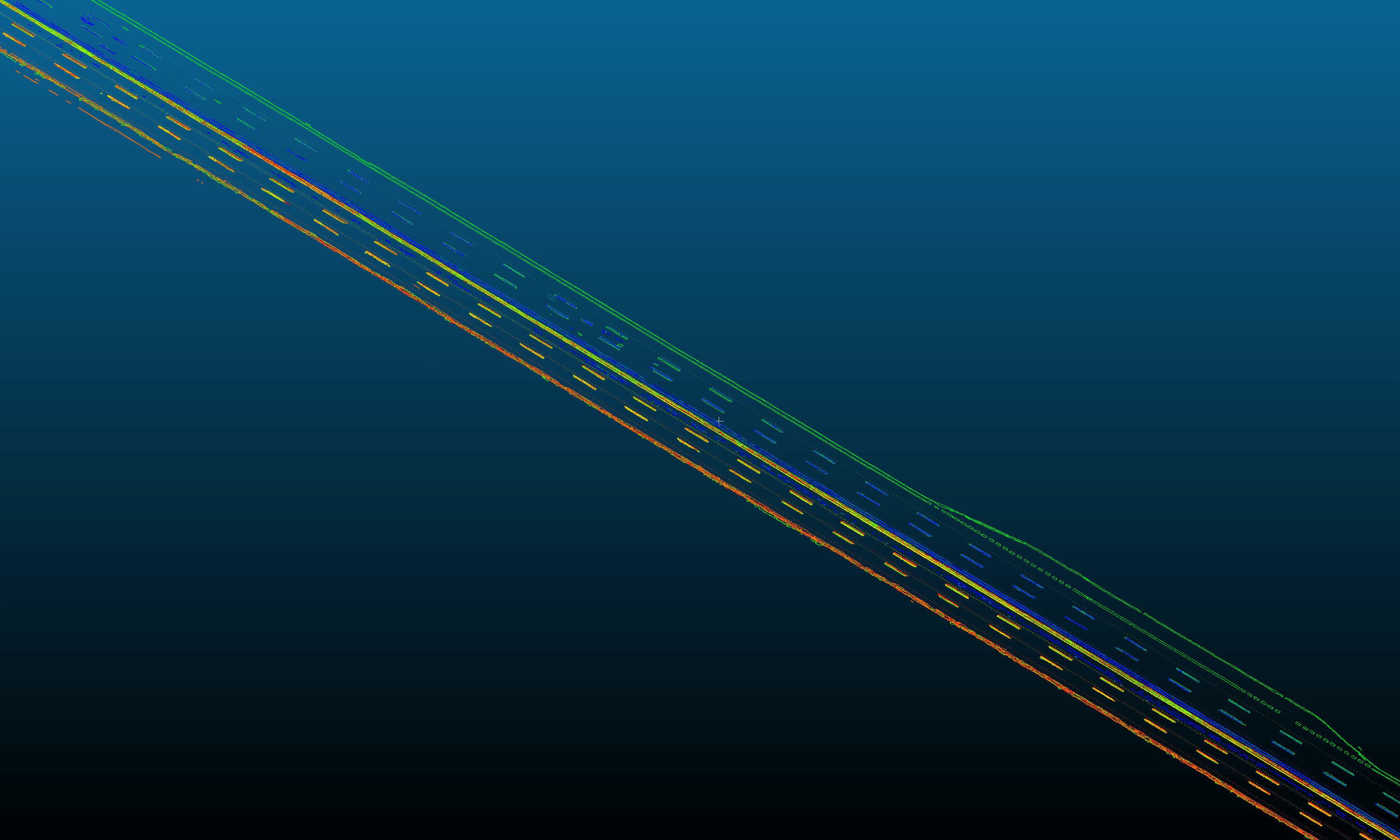 云端对齐
云端对齐 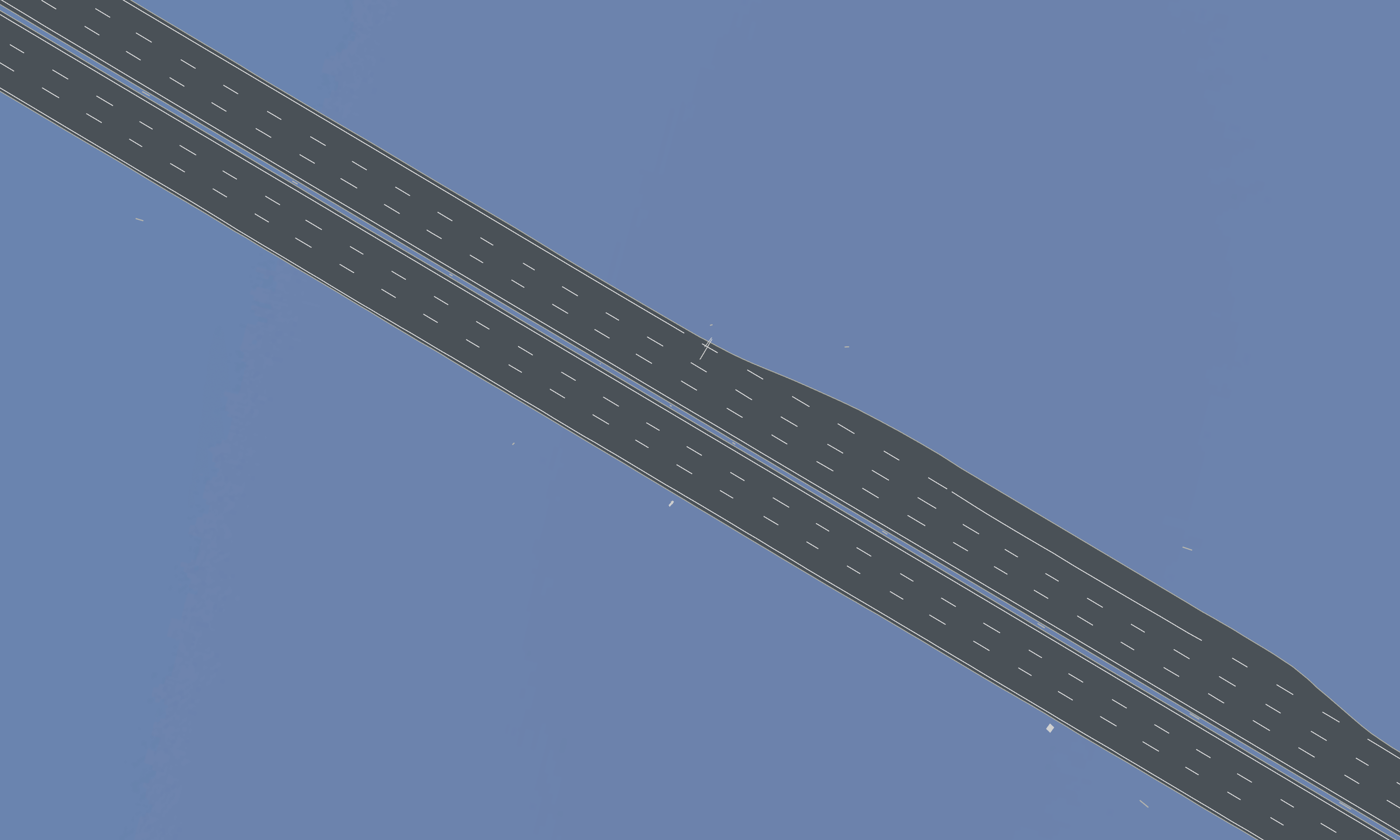 矢量建模
矢量建模 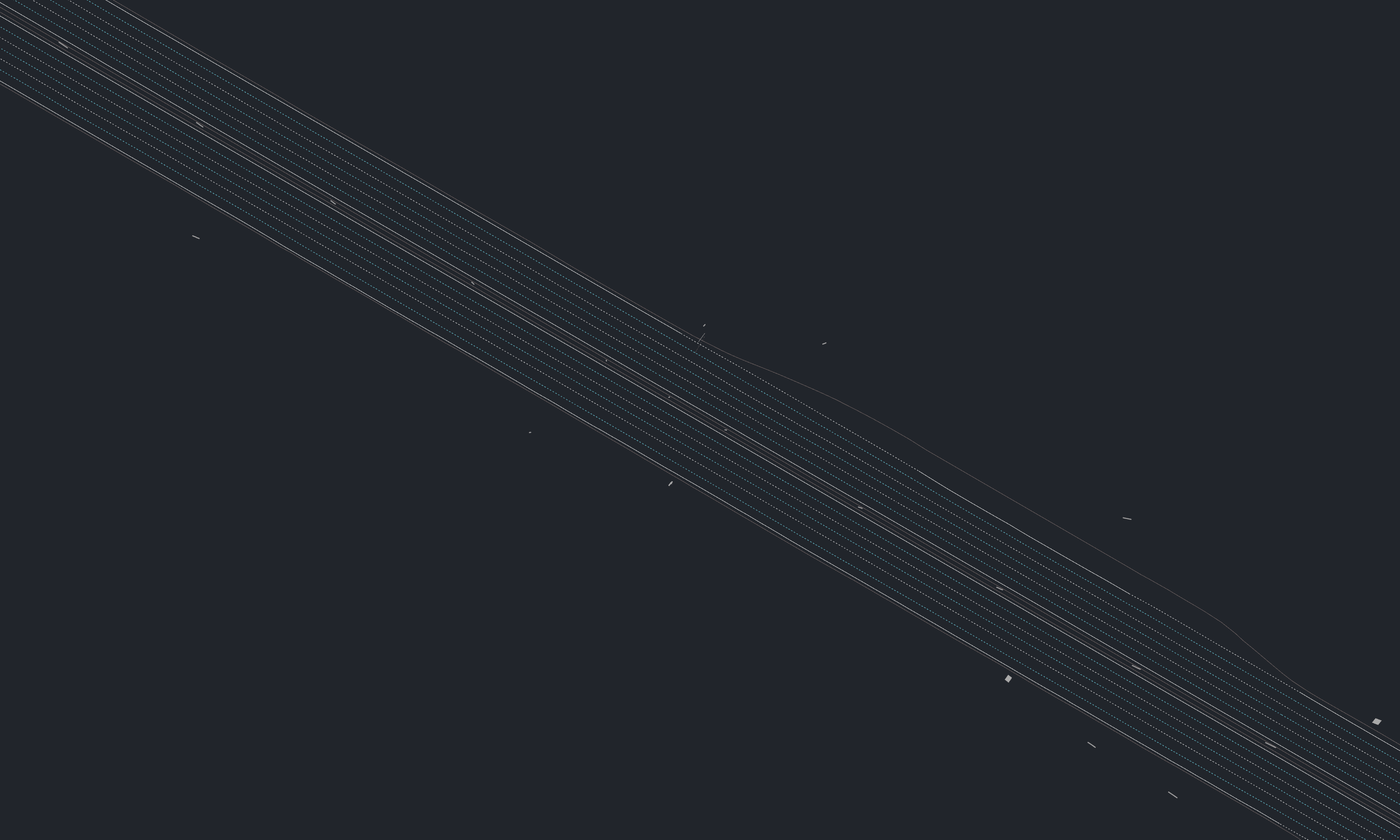 LRVD地图
LRVD地图 融合定位
行业痛点(行车)
领航辅助功能需要车辆具备车道内厘米级定位能力,传统的低成本组合导航不能满足精度要求; 传统定位方法在城市峡谷,长隧道,高架桥,主辅路,以及恶劣天气等场景定位性能不佳;
行业痛点(泊车)
高级自动泊车功能需要车辆具备停车场内厘米级定位能力; 停车场没有卫星信号,无法通过GPS进行定位; 地库环境复杂,纹理重复,多层结构;
产品优势
算力消耗低(~4000DMIPS); 适配范围广:量产车搭载的低成本硬件即可满足系统最低要求,同时,可根据客户需求进行不同传感器配置及多平台部署; 系统稳健:支持LRVD覆盖范围内的全场景、全时段定位; 精度高:道路级定位准确率:≥99.9%,车道级定位准确率 :≥ 99.7%,横向精度:10~20cm,纵向精度:20~50cm,航向角:0.2°; 航位推算误差:0.2%~0.4%; 成本低:量产低成本摄像头和GNSS, IMU和轮速; 支持行泊一体定位功能; 定位同时可构建局部矢量地图,以服务于地图的更新;